Read more of this story at Slashdot.
Shared posts
21 Sep 01:28
A Shocking Amount of E-Waste Recycling Is a Complete Sham
by BeauHD
An anonymous reader quotes a report from Motherboard: Forty percent of all U.S. electronics recyclers testers included in [a study that used GPS trackers to follow e-waste over the course of two years] proved to be complete shams, with our e-waste getting shipped wholesale to landfills in Hong Kong, China, and developing nations in Africa and Asia. The most important thing to know about the e-waste recycling industry is that it is not free to recycle an old computer or an old CRT television. The value of the raw materials in the vast majority of old electronics is worth less than it costs to actually recycle them. While consumers rarely have to pay e-waste recycling companies to take their old electronics (costs are offset by local tax money or manufacturers fronting the bill as part of a legally mandated obligated recycling quota), companies, governments, and organizations do. Based on the results of a new study from industry watchdog Basel Action Network and MIT, industry documents obtained by Motherboard, and interviews with industry insiders, it's clear that the e-waste recycling industry is filled with sham operations profiting off of shipping toxic waste to developing nations. Here are the major findings of the study and of my interviews and reporting: Real, environmentally sustainable electronics recycling can be profitable only if recycling companies charge a fee to take on old machines; the sale of recycled materials rarely if ever covers the actual cost of recycling in the United States. Companies, governments, and other organizations have a requirement to recycle old machines; because there is little oversight or enforcement, a secondary industry of fake recyclers has popped up to undercut sustainable recyclers. These "recyclers," which advertise themselves as green and sustainable, get paid pennies per pound to take in old TVs, computers, printers, and monitors. Rather than recycle them domestically, the recycling companies sell them to junkyards in developing nations, either through middlemen or directly. These foreign junkyards hire low-wage employees to pick through the few valuable components of often toxic old machines. The toxic machines are then left in the scrapyards or dumped nearby. Using GPS trackers, industry watchdog Basel Action Network found that 40 percent of electronics recyclers it tested in the United States fall into this "scam recycling" category.




Ronald.phillips likes this
07 Feb 14:53
Window To A Wetter Past In Tucson
by Alex Wild
When I lived in Tucson a few years back, I often wondered why a city even existed there. Modern Tucson is completely dry, save a few artificial ponds propped up for the golfing set. The few desert...
-- Read more on ScientificAmerican.com








-- Read more on ScientificAmerican.com
Tertiarymatt likes this
07 Feb 14:53







I Can't Stop Buying Ridiculous Keyboards
by Sean Buckley

Your keyboard is boring—completely practical, functional, useful even, but also awful, boring and stupid. You just don't know it yet. I learned about boring keyboards in college, when a nasty case of carpel tunnel syndrome threatened to silence my fingers forever. Then, one day, my father lent me a ridiculous vertical keyboard that changed how I think about typing. Now I can't stop collecting oddball keyboards.
07 Feb 14:52
")


Climb of the Century? 7 Groundbreaking Ascents (Besides the Dawn Wall)
by By Dougald MacDonald
2/2/15 - As the media frenzy swelled through January, both climbing and mass-market writers called the Dawn Wall the “climb of the century.” There’s no doubt Tommy Caldwell and Kevin Jorgeson’s 19-day, 5.14+ free climb of El Cap’s southeast face was a monumental, historic ascent. But climbing is a complex, subdivided sport, and comparing ascents of different styles is tricky business. It gets even trickier when you compare across generations—how do you gauge today's best ascents against those using hemp ropes, pitons, or straight-shafted ice axes?

Ueli Steck acclimatizing before his solo new route on Annapurna. Photo courtesy of Uelisteck.ch.
Assuming the pundits were really talking about the 21st century, are there other climbs that compare with the Dawn Wall's impact, within their own disciplines of climbing? Consider these seven ascents since 2000 that historians undoubtedly will note as groundbreaking. As you ponder this list, maybe the Dawn Wall will still rise to the top. But the 21st century is only 14 percent over—who knows what the next 86 years will bring!
Mountaineering: Ueli Steck’s solo first ascent of an 8,000-foot route on the south face of Annapurna in October 2013. Steck soloed the route—with crux ice climbing above 7,000 meters—and then downclimbed and rappelled the same line for a 28-hour round trip.
Crack Climbing: Tom Randall and Pete Whittaker’s first ascent of Century Crack, a 100-foot offwidth roof in Utah. The Brits trained specifically for offwidths for two years, then systematically repeated nearly all the hardest wide cracks in the U.S. before deciding Century Crack merited a 5.14b rating—by far the highest grade ever given to an offwidth.
Sport Climbing: La Dura Dura (9b+/5.15c). It wasn’t the world’s first 5.15c—Adam Ondra reached that milestone with Change in Norway—but this one is the hardest, and it took several years and many trips to Oliana, Spain, before Ondra and Chris Sharma both sent in 2013.
Ice Climbing: Spray On, Tim Emmett and Will Gadd’s visionary WI 10 route on the massive wall of overhanging “spray ice” behind Helmcken Falls in Canada. Gadd has since climbed a multi-pitch route to the top of the cave, and late last month he used the techniques he'd perfected at Helmcken to climb the spray ice beside Niagara Falls in New York.

David Lama free-climbing Cerro Torre's southeast ridge. Photo by Lincoln Else / Red Bull.
Free Solo: Alex Honnold’s free-solo ascent of the 23-pitch, 5.12 Regular Northwest Face of Half Dome in 2008. He has free-soloed harder long routes—Moonlight Buttress, El Sendero Luminoso—but none was more tenuous or awe-inspiring—and no other coined a verb: “Honnolding.”
Alpine: The fair means (no power-drilled protection bolts) and all-free ascents of Cerro Torre’s southeast ridge, by Hayden Kennedy/Jason Kruk and David Lama, respectively. These back-to-back ascents in early 2012 forever erased Cesare Maestri’s stranglehold on the Patagonian needle and restored the southeast ridge into one of the toughest alpine routes in the world.
Boulder: Dreamtime and The Story of Two Worlds in Cresciano, Switzerland. In 2000, Fred Nicole gave the world its first 8c (V15) boulder with Dreamtime—arguably the first internationally famous boulder problem since Midnight Lightning. The Story of Two Worlds (Dave Graham, 2005), on the same boulder, became the new standard for V15 after Dreamtime was broken and downgraded. And, yes, we’re aware that 2000 actually was the final year of the 20th century.
Tertiarymatt likes this
24 Jan 23:58







Scientists Have Worked Out What the Mysterious White Mist On Coffee Is
by Jamie Condliffe

If you've noticed a thin white mist clinging to the surface of your coffee—not the crema, northe steam, but a ghostly white layer just on the surface—you're not alone. Now, Japanese scientists are beginning to understand where it comes from.
24 Jan 05:15




How to Travel Around the World With Just a 20lb Backpack
by A Manly Guest Contributor
All images taken by Dave Danzeiser.
Editor’s note: This is a guest post by David Danzeiser.
I hung up the phone with the travel agent. I had just finished booking 45,000 miles worth of flights around the world. The trip would last a year and take me to 23 different countries.
Over a year of planning and saving had culminated with a phone call and everything was booked successfully.
The trip took me to snowy, northern Norway past the Arctic Circle, the rainy and humid islands of Indonesia, and the sunny and sandy beaches of Australia. I hiked, swam, slept outside, ate in decent restaurants, and went out to clubs.
Basically, I experienced a huge range of temperatures, cultures, climates, terrain, and activities, and I did it all out of a backpack you’d take with you to school (my pack was 26 liters and weighed 20 pounds).
Initially, after hanging up the phone with the travel agent, I was elated.
However, the reality of what I had just signed myself up for slowly started to sink in and I realized I still had a lot of work to do.
Mainly, what was I going to take with me?
In this article I’m going to discuss how I did it and what worked for me — this isn’t the solution, merely a solution.
It was a solution I put a lot of thought, effort, and research into, but ultimately, the gear I took was centered around mobility, efficiency, and inconspicuousness, and I’ll get into each of these aspects in detail throughout the article.
Overall, the decision to travel so light turned out to be one of the best decisions I made, and the number one piece of advice I give anyone getting ready to travel is to pack less.
But why, and more importantly, how?
Mobility

Mobility is the bread and butter of traveling minimally because there’s a certain freedom in knowing everything you need is with you and accessible.
People I met along the way couldn’t believe how small my backpack was when I told them I was traveling for a year. I had everything I needed, just not very much of it.
As the architectural saying goes, “Anyone can design a bridge that stands. It takes an engineer to design a bridge that barely stands.”
I wanted to pack my backpack around the idea this quote represents — finding the essential amount of gear needed to make sure I was comfortable for any environment I might encounter, while also maximizing my mobility.
Therefore, I focused on finding high quality, versatile, and compact gear.
Clothing
There are two options when it comes to being minimal with your everyday clothing:
- Buy cheaper clothes you can discard and replace when they get worn out/dirty/smelly.
- Buy high quality clothing requiring more upkeep (washing and mending) but that will last much longer.
I chose option #2.
My socks, shirts, and undies were all made from Merino wool and I tried to pick dark colors to conceal the inevitable dirt and grime build-up.
Merino wool is an amazing material. It has great flow and insulation properties (it will keep you warm when it’s cold outside and cool when it’s hot outside), it dries quickly, it has high odor resistance (you can go longer before washing), it’s not bulky or itchy, and unlike cotton it will still keep you warm if it gets wet.
Often times I’d jump into the shower wearing my shirt and undies, give them a good wash, wring them out in the sink, roll them up in my towel like a burrito, and step on it (to get more water out). Then I’d put the damp clothing back on and within minutes of walking around they would be dry and clean.
It’s the perfect material for the minimal traveler.
The everyday clothing I packed included:
- 2 t-shirts (Icebreaker)
- 2 pairs of socks (one by SmartWool, one by Icebreaker)
- 3 underwear (2 by Icebreaker, one by Exofficio)
- 1 pair of pants (Prana)
- running shorts (Prana)
- cap (Arc’teryx Spiro)
- shoes
- sandals (Invisible Shoes)
The cold weather gear I took included:
- long-sleeve Merino wool shirt (Icebreaker)
- down jacket (Montbell EX Light)
- rain jacket (Patagonia Super Cell)
- mittens
- long underwear bottoms
- beanie
- scarf/face-mask
Cold weather gear was compact and meant to be worn in layers.
For example, if it was freezing outside I could wear a t-shirt, my long sleeve shirt, my down jacket, and my outer shell rain coat.
This set up kept me warm in the coldest of weather, could be mixed up to be suitable for different climates and was much more compact/versatile than a large overcoat.
Electronics
Again, preference was given to small, light, and compact electronics, and I substituted many bulky charging cables for 3-inch replacements.
Electronics I packed:
- laptop with charger (Sony Vaio Z-Series)
- camera with charger (Sony NEX-5)
- waterproof sport camera (Kodak Play Sport)
- Amazon Kindle
- pocket flashlight
- universal travel adapter
- USB mini-cables (3″ cables for phone, Kindle, and Kodak)
- 1.5 TB external hard drive
- 8 GB flash drive
- Apple iPhone
Miscellaneous Gear
I hope you’re beginning to sense a theme when it comes to being mobile on the road. The miscellaneous gear continues to follow this theme:
- insulated water bottle
- travel clothesline
- sleep mask with ear plugs
- silk sleep sack
- tripod (Gorillapod)
- sunglasses (Ray-Ban Foldable Wayfarers)
- pen (Inka Expandable)
- towel (PackTowl Ultralight XL)
- notebook (Moleskine)
- toiletries
That covers the nuts and bolts of what I took with me to fit everything into a small, single backpack so I could be as mobile as possible (if you want even more detail, check out my gear list).
With this mobility comes flexibility, and flexibility is what I found most satisfying, and why it’s my number one piece of advice to any traveler.
The Benefits of Packing for Mobility
It allowed me to plan on the go, stretch my dollars, and minimize issues in airports:
Plan On the Go
I enjoy planning just as much as the next A-Type personality, but while you’re traveling long-term, it can get exhausting, and sometimes planning isn’t possible due to poor/non-existent internet connections.
With a small bag you’re mobile and flexible, which allows you to plan on the fly.
Some of my favorite adventures and stories were unplanned and happened organically because I wasn’t tied down by large amounts of luggage:
In Petra, Jordan I met a merchant selling souvenirs and she invited me stay with her and her family in their 2000-year-old cave. I ate dinner, played card games, chatted over candle light, and slept there. I was carrying everything I owned with me, so I didn’t have to worry about all of my luggage back at the hostel being safe when I didn’t come back.
I happened to be in Sydney, Australia during a particularly eventful weekend. I was able to easily walk around all day exploring the city and checking to see if there were vacancies in 15 different hostels. No luck. But throughout my day of exploring I came across an awesome roof deck, so I bought a box of goon (boxed wine), drank it, and then blew up the wine bladder and used it as a pillow as I slept on the roof deck. The view was incredible, to say the least.
Finally, on my way to Bruges from Brussels I stopped for the day in Ghent. Since my bag was small enough I was able to rent a locker in the train station, and explore Ghent for the day before catching the evening train into Bruges.
Budget Friendly
When you’re traveling on a budget, your largest cost will most likely be transportation (39% of my spending for the year went to it). Any way you can save money on transportation will mean extra money for entertainment and experiences.
One of the best ways to save money is to utilize public transportation like subways and buses. But, lugging around and keeping track of large luggage in a bus/subway where it’s standing room only is not fun and sometimes impossible in the packed subways of larger cities.
The minimal luggage allows you to quickly navigate crowded transport areas instead of having to spend extra money on a cab with space for all of your stuff.
Breeze Through Airports
Packing for mobility makes airport travel a breeze in situations where it would normally be the most stressful part. A few benefits include:
- You don’t have to check luggage so checking in is easy and you don’t have to wait around at baggage claim when you land.
- You can change flights last minute and not have to worry about your luggage making it.
- You don’t have to worry about airlines losing your luggage.
- No wasted money on checked-bag fees.
After you have minimized your packing list to the essentials, the next step is to pack your bag as efficiently as possible.
Efficiency
Everyone is going to have their own preferences of course, but what follows is my set up after about 6 months on the road when the kinks had been worked out.
Organization and compartmentalizing is the key to packing efficiently.
You want things you use often easy to reach, and when you need to get something at the bottom of the pack, it’s nice to be able to quickly repack everything without having to refold clothes, or hunt down each pair of socks.
One of the reasons I chose my backpack (which is the Tom Bihn 26L Smart Alec), is because of its organizational capabilities.
On top of having many internal pockets to help with organization, it also has O-rings located within the pack which you can hook smaller organization pouches to, which lets you pull the smaller pouches out of the way while still keeping them attached to the pack so you can get what you need at the bottom.
This compartmentalization is amazing for not forgetting something when you’re in a hurry. Imagine trying to catch the first bus out of town after you’ve woken up late and you have to pack everything quickly in the dark hostel dorm room while everyone else is still sleeping (may or may not be a true story).
My extra pouches/bags within the backpack:
- toiletries bag
- chargers/cables pouch
- padded pouch for external hard drive
- vertical padded laptop pouch
- packing cube for cold weather gear
- bag for clean clothing
- bag for dirty clothing
As I traveled, I found I had a problem when I needed something (like my camera or journal with directions written in it) and I was walking around with the pack on.
I’d have to take off the pack, get what I needed, use it, put it back in the pack, and then put the pack back on.
I was in Australia and about a month into the trip, I realized I was having trouble sticking to my $50/day budget, so my solution was to start cooking more of my food, but I needed a way to carry the meals.
I ended up buying a reusable shopping bag for 99 cents and it was probably the most useful thing I have ever bought for a dollar.
The bag lasted the entire rest of the trip and I still use it when I travel today.
Since it’s handheld and has an open top I use it to hold meals/groceries, my camera, journal, maps, or even my long-sleeve shirt; it also eliminates the need to take off my backpack to get something while I’m out and about.
Inconspicuousness
Finally, I wanted to blend in as best as I could in whatever culture I happened to be in:
- I made sure to pick inconspicuous colors (browns, blacks, and grays) so I could minimize sticking out and being targeted as someone with valuables.
- Instead of saving directions on my iPhone I’d write directions down by hand in my journal so if I was in a sketchy area I didn’t have to pull out my phone to figure out where I needed to go.
- When I was out taking photos I’d carry my camera in an opaque grocery bag instead of a camera case or around my neck.
These days, it’s pretty safe to assume when you see a younger person with a giant bright backpack that they are likely carrying something valuable in the form of technology (phone, camera, computer, tablet, etc.) or at the very least, cash, credit cards, and a foreign passport, which can be a dangerous thing to signal when you’re in larger cities known for theft.
Having a small backpack was very helpful in being inconspicuous, and since it was so small I didn’t even stick out as a backpacker.
Final Words
As I said in the beginning, deciding to travel for a year out of a 26-liter backpack was one of the best decisions I have ever made.
Not only did it allow me the freedom and flexibility to have some amazing and organic adventures, which could have been lost had I been tied down by obnoxious luggage, but it was also an amazing lesson in being content with what I did have and learning about what’s really important to me.
It also taught me to be very aware of consumption.
Anything I bought meant I would have to carry it for the rest of my journey. Was it worth it? Did I really need it or would the money be better spent on a new experience?
Living for an entire year out of a backpack and never feeling like I was missing anything really put things in focus when I came back to the US, where I feel constantly pressured to buy and consume.
I came to realize the more stuff I owned the more freedom I gave up to store and maintain it; sometimes it is worth it, but sometimes it’s not, and this year-long trip out of a 26-liter bag really helped to put it in perspective.
My goal for this article was to give you some insight from someone who has done it and what worked for me. Obviously everyone is different and everyone has different values and goals when they travel, but I hope next time you are packing for a trip you try to be content with less and see what kind of experiences you can have with the added flexibility.
_____________
David Danzeiser is the creator of The Quest for Awesome, where his goal is to connect with people striving to pursue their own vision of excellence through whatever they are doing. He is determined to become location independent to continue traveling full time and along the way he’d love to connect with like-minded people to learn from and help in any way he can.
Joules Swan, lbstopher and 6 others like this
09 Jan 23:17
Generative Syntax: The DP Hypothesis This is one of a series of...
Generative Syntax: The DP Hypothesis
This is one of a series of videos from the University of Edinburgh featuring Prof Caroline Heycock and some really nice-looking glowy syntax trees. They’re all on generative syntax, and they follow the chapter numbers of the free online textbook “Syntax of Natural Language” by Santorini and Kroch. There is not (yet?) one for every chapter, but it looks like they’re continuing to add to them, although the comment I left on youtube several weeks ago asking why they’ve started with chapter four remains unanswered.
This video does start at quite a high level: for more basic introductory syntax videos, there’s one by Martina Wiltschko and one by thelingspace, and of course my series on how to draw syntax trees.
Tertiarymatt likes this
08 Jan 19:10
Intel ‘Compute Stick’ Is an $89 Chromecast-size PC That Runs Ubuntu
by Joey-Elijah Sneddon
 Imagine being able to carry a fully functioning Intel-based Ubuntu PC in your shirt pocket. Now stop imagining it because it's here. Say hello to the Intel Compute Stick.
Imagine being able to carry a fully functioning Intel-based Ubuntu PC in your shirt pocket. Now stop imagining it because it's here. Say hello to the Intel Compute Stick.
The post Intel ‘Compute Stick’ Is an $89 Chromecast-size PC That Runs Ubuntu first appeared on OMG! Ubuntu!.
Tertiarymatt likes this
07 Jan 17:06







Bill Gates shows us the future drinking a glass of water made from poop
by Jesus Diaz
Bill Gates loves the Janicki Omniprocessor, an amazing machine that turns human waste into electricity and drinkable water. He saw it and he is extremely impressed. So impressed in fact that he drank from a glass of water that was human poop only five minutes earlier. "It's water," he said, obviously relieved.
07 Jan 17:04
Google Scholar Pioneer Reflects on the Academic Search Engine's Future
As Google Scholar approaches its 10th anniversary, Nature spoke to its co-creator Anurag Acharya
-- Read more on ScientificAmerican.com







-- Read more on ScientificAmerican.com
29 Dec 02:52
Linguistically relevant xkcd comics
Linguistically relevant xkcd comics:
Arnold Zwicky’s blog has a list of linguistically relevant xkcd comics, along with links to their associated commentary from his own blog and/or Language Log. There are about a hundred of them, but even a brief scan is pretty interesting, and a great reference if you’re looking for a particular linguistically-relevant xkcd to use as an example somewhere.
I’m especially amused by the very first one, where Mark Liberman notes on Language Log in 2006 that computational linguistics has officially “arrived”.
27 Dec 05:46
Spread the Sign: Multilingual sign language dictionary
Spread the Sign: Multilingual sign language dictionary:
Spread the Sign is an online multilingual sign language dictionary: you can type in a word, phrase, or fixed expression and get it translated into almost two dozen different national sign languages, including Swedish, British English (BSL), American English (ASL), German, French, Spanish, Portuguese, Russian, Estonian, Lithuanian, Icelandic, Latvian, Polish, Czech, Japanese, and Turkish.
Not all languages are available for every word, but all the ones I tried had at least a dozen or so languages available. Once you’ve searched for a word or phrase, you click on the flag for the national sign language that you want, and you can see a video clip of the sign as well as a translation into the same country’s spoken/written language.

It’s a project of the European Commission, so there tend to be more European languages — I notice a lack of Auslan (Australia), for example, so here’s a list of around 300 sign languages — but it’s definitely a great rebuttal to the idea that there’s only one sign language, as well as being incredibly interesting to click around!
Note though that it’s just a dictionary, and doesn’t account for grammatical differences between the languages in addition to the vocabulary, although you could probably recover some of the grammar from close attention to the phrases.
There is also a list of fifteen different sign alphabets, with images. Note that despite the fact that most of the fifteen languages are spoken in countries that use the Latin alphabet, their signs for, say, A, do not generally resemble each other. As a particularly obvious example, ASL has a one-handed alphabet while BSL has a two-handed alphabet. And Japanese Sign Language has signs for all the hiragana, which isn’t strictly speaking an alphabet. (Is the distinction between an alphabet and a syllabary still meaningful when you’re signing both of them? I…honestly have no idea. Apparently there is an Arabic Sign Language alphabet though, and none of the charts I found online include the short vowels, so I guess it would still qualify as an abjad? Wow, I don’t even know.)
John Costello likes this
24 Dec 09:21

The day I met a creationist at the science conference
by Kiki Sanford
The last place you expect to meet a creationist is at the annual American Geophysical Union conference. I don't know how I got so lucky.
Read the rest
24 Dec 09:18
Pi HomeGuard: helping people stay independent longer
by Helen Lynn
Several people have mentioned the idea of using the Pi to help relatives and carers support older people in their own homes by monitoring aspects of their daily routine as well as things like the indoor temperature, but until now, we hadn’t seen anyone write up a system they’d implemented. So we were very interested when we received an email from Jamie Grant, telling us how he had used a Raspberry Pi-based home monitoring system to help him support his late mother in maintaining her independence.
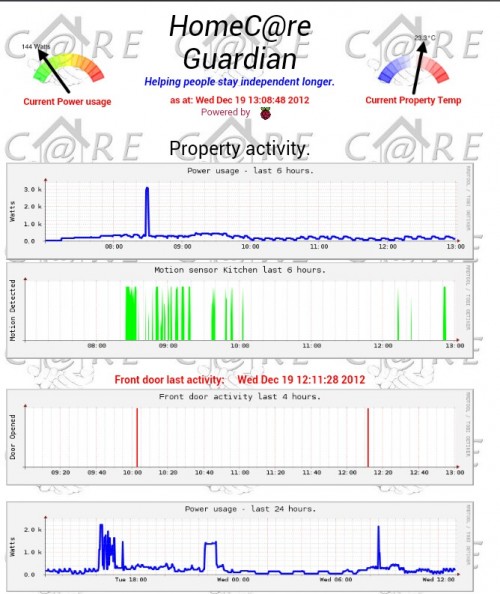
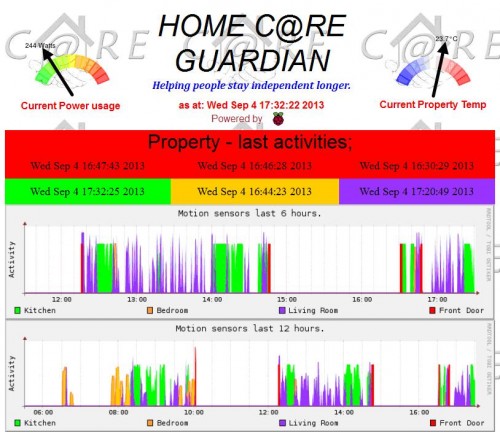
An early Pi adopter, one of Jamie’s first projects was home power monitoring. After installing a system to plot electricity usage in his own home using CurrentCost hardware and a Raspberry Pi, he was struck by the “kettle spike”, a power spike that shows clearly that someone is up and making tea. His mother was very elderly, was living alone and had a worsening serious illness, and it occurred to him that the kettle spike would provide a useful indication that she was OK. He decided to install the system at her house, adding some wireless PiR (passive infrared) motion and door sensors. Jamie called this first version HomeCare Guardian; power and sensor data were displayed in a simple webpage. Here’s another screenshot, showing the system in 2013, after about a year of development:
From this single page, Jamie could see whether his mum was OK and going about her usual daily routine, and a sensor at the front door indicated when she took a taxi journey to visit her friends and when she returned. He says,
I found Homecare Guardian a great comfort and my sister and I used it daily to check on her condition. Near the end mum was more forgetful and sometimes left her front door open, we could see whenever this happened and I would call round and check she was alright.
Mum managed to stay totally independent and was only admitted to our local hospital for her last week where she got the best possible care.
Jamie has continued working on the wireless sensors and their power requirements: his latest PiR motion sensor is powered by just two AA batteries and has a battery life of over a year, and his new door sensor has an estimated battery life of over three years. With sensors for motion, door opening, indoor temperature and water (to provide flood alerts) ready to go, he hopes to add a humidity sensor soon. The same system, he observes, could also be used for checking an unoccupied property for flood or frost risk as well as other aspects of security. Very recently he has been working with an Android app developer, and they’re hoping to add an alerts app facility soon.
The system has been renamed as Pi HomeGuard, and you can see a working live site, all running off a Raspberry Pi, at www.pihomeguard.com. Jamie is interested in taking this prototype further and making it more widely available, and would be glad to make contact with people who’d like to become involved; if this describes you, say so in the comments, and we’ll put you in touch.
Addendum: 21/12/14
My mini Pi server is taking 000s of hits at present, sorry if anyone finds it a bit slow. Please see more details at my information site: http://pihomeguard.co.uk
Many thanks to all at Pi Foundation,
best regards & Merry Christmas,
Jamie
23 Dec 19:14
Cet article a été originellement publié en décembre 2013.
Pendant les douze ans qu'a passés Hitler au pouvoir en Allemagne, il n’était pas question de laisser un seul aspect de la vie d’un Allemand hors du contrôle de l’État totalitaire, notamment quand un de ces aspects est une grande fête annuelle célébrant la naissance d’un juif. Les nazis ont donc pris soin d’accommoder Noël à leur sauce, comme le raconte cette rétrospective de Fast Company du 23 novembre 2013. Nous vous avions déjà montré sur Slate.fr comment Hitler a fêté Noël 1941 (vous pouvez revoir les photos de son réveillon ici) et comment les nazis, épaulés par l’église protestante, ont purgé les chants de Noël de leurs références chrétiennes. L’article de Fast Company rappelle tout cela, et nous apprend également pourquoi la fête de Noël était une cible de priorité pour les nazis au pays d’O Tannenbaum: «l’idéal chrétien de la paix» qu’elle véhiculait «incarnait tout ce que méprisait Hitler». Il convenait donc de rendre la fête moins chrétienne, à commencer par les chants sus-évoqués, mais aussi par ce bedonnant père Noël, inspiré par un Saint Nicolas «clairement chrétien et très certainement non-aryen»: «Et pourtant, le père Noël était si aimé que même les nazis n’eurent le courage de mener une guerre contre lui. Au lieu de cela, ils ont changé son nom. Les nazis affirmaient que la figure barbue vêtue de blanc qui ... Lire la suite
Comment Hitler a tenté de réinventer Noël
by Laurent Pointecouteau
Cet article a été originellement publié en décembre 2013.
Pendant les douze ans qu'a passés Hitler au pouvoir en Allemagne, il n’était pas question de laisser un seul aspect de la vie d’un Allemand hors du contrôle de l’État totalitaire, notamment quand un de ces aspects est une grande fête annuelle célébrant la naissance d’un juif. Les nazis ont donc pris soin d’accommoder Noël à leur sauce, comme le raconte cette rétrospective de Fast Company du 23 novembre 2013. Nous vous avions déjà montré sur Slate.fr comment Hitler a fêté Noël 1941 (vous pouvez revoir les photos de son réveillon ici) et comment les nazis, épaulés par l’église protestante, ont purgé les chants de Noël de leurs références chrétiennes. L’article de Fast Company rappelle tout cela, et nous apprend également pourquoi la fête de Noël était une cible de priorité pour les nazis au pays d’O Tannenbaum: «l’idéal chrétien de la paix» qu’elle véhiculait «incarnait tout ce que méprisait Hitler». Il convenait donc de rendre la fête moins chrétienne, à commencer par les chants sus-évoqués, mais aussi par ce bedonnant père Noël, inspiré par un Saint Nicolas «clairement chrétien et très certainement non-aryen»: «Et pourtant, le père Noël était si aimé que même les nazis n’eurent le courage de mener une guerre contre lui. Au lieu de cela, ils ont changé son nom. Les nazis affirmaient que la figure barbue vêtue de blanc qui ... Lire la suite

{kind=link}
{kind=link}
14 Dec 13:23
News Analysis: A Climate Accord Based on Global Peer Pressure
by By CORAL DAVENPORT
The agreement reached in Lima, Peru, would be a breakthrough in 20 years of efforts to create a global warming accord, but it falls short of what scientists say is needed.





09 Dec 22:45
Sobre Deficiência, Opressão e Assistencialismo
by Victor Caparica
No dia 3 de Dezembro é celebrado o Dia Internacional da Pessoa com Deficiência, data em que se busca atentar as pessoas para uma forma de opressão muito menos óbvia que outras como o racismo, o machismo e a homofobia. A intenção não é, de modo algum, diminuir a urgência dessas lutas sociais tão importantes, mas sim explicitar como uma forma de opressão igualmente cruel e massacrante é perpetrada todos os dias sem receber a mesma atenção no debate cotidiano.
Afirmar que as pessoas com deficiência são um grupo oprimido na sociedade implica reconhecer alguns fatos relativos a essas pessoas. Primeiro, implica que no meio social essas pessoas são inferiorizadas simplesmente por serem pessoas com deficiência. Implica também reconhecer que essa inferiorização decorre de uma ideologia socialmente estabelecida acerca da deficiência, no caso uma ideologia produtivista que avalia o indivíduo de acordo com o quanto ele é adequado às ferramentas e meios padronizados de trabalho. Também implica reconhecer que tanto o entendimento de inferioridade da pessoa com deficiência quanto a ideologia social que o sustenta são produções sociais perversas, de modo algum condições naturais, muito menos inevitáveis. Finalmente, implica reconhecer que existem grupos sociais que de uma maneira ou de outra se beneficiam da manutenção dessa ideologia e dessa inferiorização. Isso vale para a opressão contra as mulheres, contra os homossexuais, e definitivamente contra as pessoas com deficiência.
Mas que grupos se beneficiam da manutenção dessa condição de inferiorização e patronato? Considere a essência do sistema de produção atual, baseado em replicação padronizada do trabalho. Idealiza-se um trabalhador-modelo, com altura média, peso médio, força física média, todas as partes do corpo em bom funcionamento e todos os sentidos intactos, e são produzidos postos e ferramentas de trabalho moldados para esse indivíduo que, de certa forma, não existe. E as pessoas que não são esse indivíduo que tratem de se adequar aos meios disponíveis, e as que não se adequarem, bem, a culpa deve ser delas, não?
Para entender melhor essa relação de responsabilidade social, cabe pensarmos um pouco na separação entre lesão e deficiência. Lesão é uma condição física e/ou sensorial, biológica e pertencente ao indivíduo. Não enxergar é uma lesão. A deficiência, por outro lado, é uma condição social, externa ao indivíduo e imposta pela ideologia estabelecida de que as pessoas devem ter integridade física e sensorial para participarem plenamente da sociedade. A deficiência ocorre não quando o indivíduo não consegue enxergar, mas quando a privação desse sentido o impede de acessar elementos da vida cotidiana. Não porque o sujeito não pode ver a luz, mas porque a sociedade se constrói e sustenta sobre o pressuposto de que todos podem. Vamos a uma analogia que talvez esclareça as coisas.
Imagine se por padrão todos humanos nascessem com asas e aprendessem a voar ainda bebês. Voar é então uma característica comum e é sobre o modelo-padrão de uma pessoa que voa que a sociedade se estruturou. Assim sendo, vejam bem, não há nenhuma necessidade para a entrada dos edifícios ser no térreo, e muito menos para elevadores ou escadas, já que todos, inclusive você, chegam voando no andar do trabalho. Ruas e calçadas também fazem pouco sentido, e as paisagens urbanas provavelmente são pensadas primariamente para observadores aéreos. Só que como todos sabemos, humanos são tudo, menos seres padronizados, e alguns terão asas menores que outros, e alguns certamente nascerão sem asas. E outros que assim como você nasceram com boas asas saudáveis ainda poderão perdê-las em decorrência de alguma doença ou acidente, e assim teremos, somando essas pessoas, uma boa população de humanos que não sabem voar. Para essas pessoas, não existem empregos em prédios, porque as entradas ficam lá em cima. O que quer que elas saibam fazer ou fizessem quando podiam voar não tem mais aplicabilidade, porque agora seus corpos não estão mais de acordo com os meios padronizados e inflexíveis de produção. E assim essas pessoas são impedidas de produzir, de consumir e de interagir com o meio em que vivem, e são por isso declaradas inválidas. Agora imagine que de repente a sociedade passe a se importar com a exclusão dessas pessoas e construa, por exemplo, escadas e elevadores, ruas e calçadas, pense na arquitetura urbana também para quem está no chão e promova seus eventos não apenas para a maioria que pode voar. De repente, como num passe de mágica, os indivíduos sem asas continuam com suas lesões mas não experimentam mais a condição da deficiência, porque seu pleno convívio social não é mais afetado pelos pressupostos de normalidade. Eles ainda não podem voar, mas graças a medidas de acessibilidade isso não as impede mais de prosseguir com suas vidas.
De acordo com a Organização Mundial de Saúde temos hoje aproximadamente 15% de pessoas com deficiência na população global. Em países com grande desigualdade social como o Brasil esse número é maior por conta do baixo acesso à saúde pública. 15% da população global são aproximadamente 1 bilhão de seres humanos, uns 45 milhões só no Brasil. Pense um pouco agora: Se 15%, 1 em cada 7 pessoas, têm alguma deficiência, como é que você não vê toda essa gente na rua quando vai trabalhar? Por que é que a estatística não bate com sua experiência cotidiana?
Porque, das ruas aos shoppings, das escolas aos meios de transporte, as estruturas urbanas não consideram as pessoas que não se enquadram na norma física e sensorial estabelecida. Então a pessoa com deficiência normalmente prefere ficar em casa, porque sair e enfrentar o normativismo inflexível dos lugares públicos é no mais das vezes uma experiência degradante, cansativa e humilhante, onde mais do que tudo fica salientado o quanto ela não faz parte daquele meio. Nesse contexto, você sairia de casa com freqüência? E quantas vezes até se cansar? E assim acaba que não se vê muitas pessoas com deficiência em locais públicos como academias, praças, shoppings, restaurantes e lojas. E sabem qual a maior consequência prática disso? É que se nesse espaço público não vêm pessoas com deficiência então não faz sentido gastar tempo e dinheiro adequando as coisas, afinal não existe demanda. Então não tem pessoas com deficiência na faculdade porque não existem condições adequadas para elas, e essas condições não são criadas pois não há alunos matriculados que justifiquem a demanda. E assim a pessoa com deficiência se torna um problema de compatibilidade e inclusão para a sociedade de pessoas sem deficiência.
É quando chegamos a um dos elementos mais graves dessa equação, que é o assistencialismo. Este se sustenta na concepção de que a deficiência é uma fragilidade inerente ao indivíduo, um infortúnio que precisa ser amparado em caráter de caridade para com os vulneráveis. Para o assistencialismo a pessoa com deficiência é menor por definição e precisa de ajuda muito mais do que de condições de igualdade, e o resultado dessa relação é o reforço do domínio da normalidade sobre aqueles que dela se desviam, reiterando os papéis de patrono e dependente e frisando a importância de ser “normal”. E se muitas pessoas com deficiência realmente precisam desse assistencialismo não é por serem o que são mas porque a sociedade se organizou de modo a colocá-las e mantê-las nessa condição.
O que as pessoas com deficiência precisam não é de assistencialismo ou patronato. Elas precisam é ter acesso às mesmas escolas e aulas que seu filho sem deficiência teve, precisam do mesmo acesso à cultura e ao lazer que formaram você e seus amigos. Quando recebem isso, essas pessoas costumam fazer tanto quanto seus colegas sem deficiências, e por vezes até mais pois a vida com deficiência nos ensina a lidar com dificuldades e solução emergencial de problemas o tempo todo. Quando você precisa resolver uma série de contratempos até mesmo para sair de casa e comprar pão, bem, você eventualmente fica bom nisso.
E é precisamente quando você começa a ficar bom nisso que surge o último aspecto que quero abordar neste texto, que é o da dualidade “vítima” versus “herói”. Funciona assim: Eu enquanto cidadão faço como a maioria de nós o meu melhor para ser produtivo e socialmente útil e para conseguir as coisas que quero, sejam objetos ou condições. Eventualmente, como ocorre com boa parte de nós, meus esforços rendem frutos, e às vezes são belos frutos, daqueles que você elogia quando um amigo seu colhe. É precisamente aí que surge a dualidade, porque em geral os discursos que a pessoa com deficiência ouve nessas horas escoam para a piedade ou para a profunda admiração. Quanto à piedade, ou a opção “vítima”, não há muito o que comentar: “Pobrezinho, tão esforçado, com uma infelicidade dessas, não merecia estar assim, mas puxa vida, Deus sabe o que faz né?” A deficiência é, sob todos os aspectos, vista como uma desgraça inerente, algo a ser lamentado e que deixa as pessoas perplexas com como você AINDA ASSIM consegue sorrir e ter esse bom humor. O outro lado requer um pouco mais de atenção, pois a princípio parece algo bonito. Você conseguiu um bom emprego, trabalhou duro, estudou, se especializou, provou seu valor e agora foi promovido a diretor na empresa. Então as pessoas vêm lhe dar os parabéns, e é quando surge a conversa do “herói”: Puxa vida, quanta coisa você conquistou MESMO SENDO DEFICIENTE, olha, a gente que não tem nenhuma deficiência não chega tão longe e você faz tudo isso, imagine só se enxergasse! Não sei se vocês perceberam, mas dentro desse discurso está a noção de inferioridade, como se fosse motivo de maior espanto uma promoção de cargo para uma pessoa com deficiência do que para outra sem. Para entender melhor, tente trocar a pessoa com deficiência nesse exemplo por uma mulher ou um afro-descendente e veja como soa o elogio de admiração, mas não se assuste se soar condescendente e intrinsecamente pejorativo, porque é exatamente do que se trata. Não importa o que você fez, importa que mesmo sendo menos que uma pessoa completa você AINDA ASSIM conseguiu.
Então eu termino essas reflexões com dois apelos encarecidos a todos vocês que tiveram a paciência de ler até aqui. Primeiro, parem de dizer para o cego que ele enxerga mais do que você, porque ele não precisa disso para se sentir completo, ao contrário isso só evidencia que você não pensa nele como uma pessoa inteira. O mesmo vale para todas as outras formas de admiração condescendente para com essa ou aquela deficiência. Nós não precisamos de metáforas que nos aproximem do modelo-padrão de corpo humano para nos sentirmos completos, já somos tão completos quanto qualquer humano pode pretender ser. Não somos nós que nos entendemos como menores, são vocês que nos vêem dessa forma, e o erro está todo na visão e não no objeto.
O segundo apelo é mais exigente e requer mais atitude do que apenas compartilhar a leitura com outras pessoas. Envolve parar de achar aceitável que as pessoas com deficiência sejam excluídas e inferiorizadas por não se enquadrarem nas normas pré-estabelecidas. Envolve não aceitar que os espaços que você frequenta só possam ser frequentados por quem se enquadra nessa norma. Envolve rejeitar veementemente o argumento do dono do cinema que diz que não tem público com deficiência que justifique os gastos e contratempos de criar acessibilidade. Envolve perguntar na sua faculdade se todo o prédio e todo o material didático estão de acordo com as determinações de acessibilidade do MEC ou se só pessoas sem deficiência podem estudar lá. E mais do que tudo, ao ouvir a resposta de que o lugar não tem acessibilidade, envolve não balançar afirmativamente a cabeça ou apenas dizer que seria bom se tivesse, mas se indignar e exigir o cumprimento da lei como se fossem sua mãe, seus filhos e seu irmão as pessoas impedidas de nele entrar. Se mais pessoas agissem assim, talvez não houvesse a necessidade de longos argumentos apresentando a seriedade e urgência de um problema que você muito provavelmente nunca viu discutido antes deste texto. Um ótimo Dia Internacional da Pessoa com Deficiência para você.
08 Dec 01:29
Khoisan have been the largest population throughout most of modern-human history
Tertiarymatt likes this